一凡 發自 凹非寺
量子位 | 公眾號 QbitAI
2025年最受資本熱捧的具身智能初創公司,在2025年年終完成了“首秀”。
它石智航,成立不到1年拿了17億元融資后,剛剛交卷,舉行了首次技術發布會。
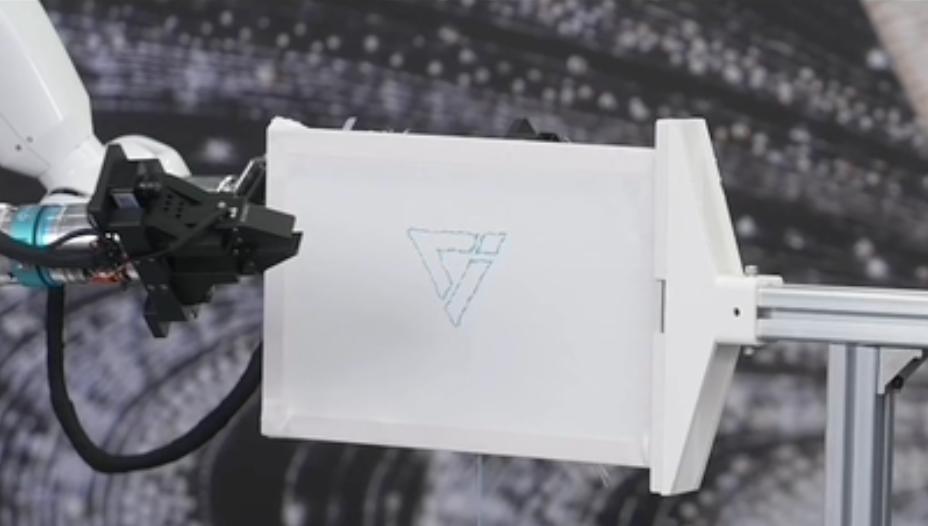
而它石的首秀,也是通過“繡”展現的——
首秀繡的是正是它石智航的LOGO,它石介紹說這是世界首臺會刺繡的機器人。
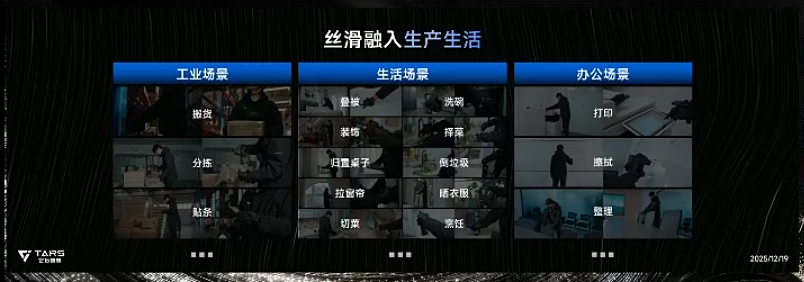
不只會干針線活,也能下車間:

以及今年各路機器人的基操——跳舞:

這背后的絲滑動作,都是由基于真實數據訓練的世界模型輸出。在不同場景下執行不同任務,覆蓋家庭和車間也意味著,這不僅僅是一場技術發布會,也是商業化潛力的展現。
而背后支撐這一切的,是它石智航對下一代具身智能Scaling Law的理解。
它石智航“首繡”
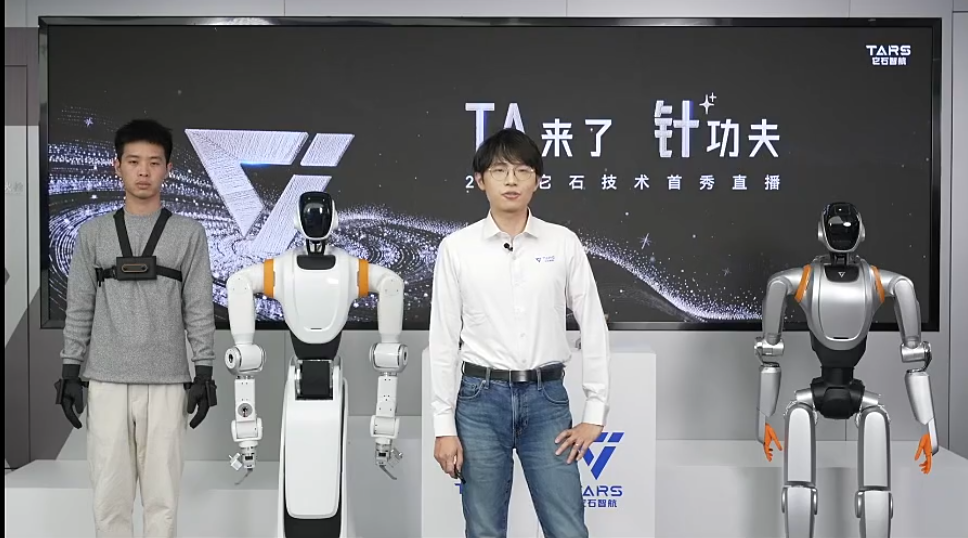
它石智航剛剛展示了兩款產品:
工業機器人A系列(下圖左二)和通用機器人T系列(下圖右一),從下肢就能看出他們的差別。
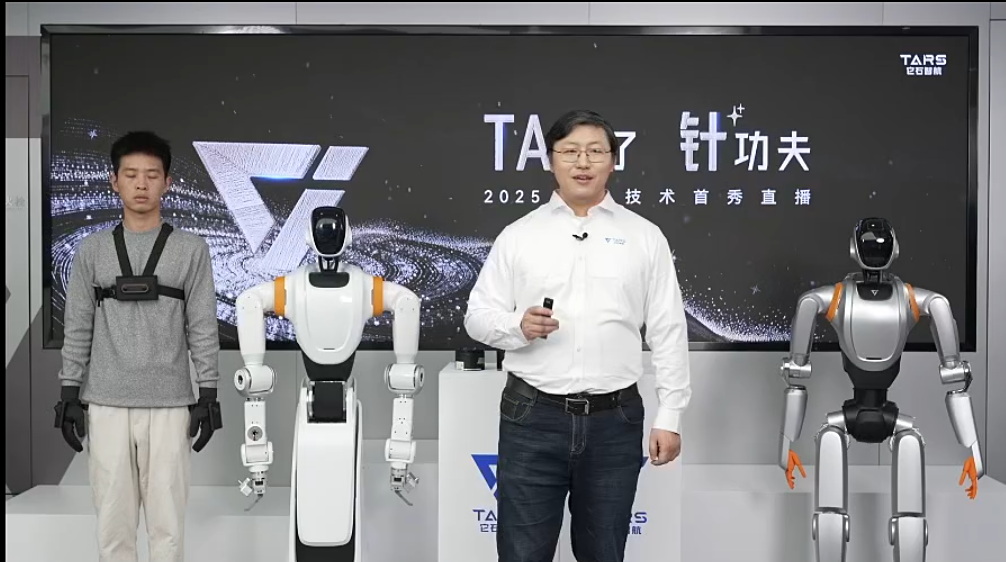
△A系列和T系列中間的是它石智航創始人、CEO陳亦倫
它石認為這體現了復雜操作任務的多種能力,亞毫米級精度、雙手協同、連續觸覺和力覺反饋調節和長時序任務的執行等。
所以為什么展示機器人的刺繡能力?這背后有兩個原因:
秀技術和救手藝。
首先,是秀技術實力。
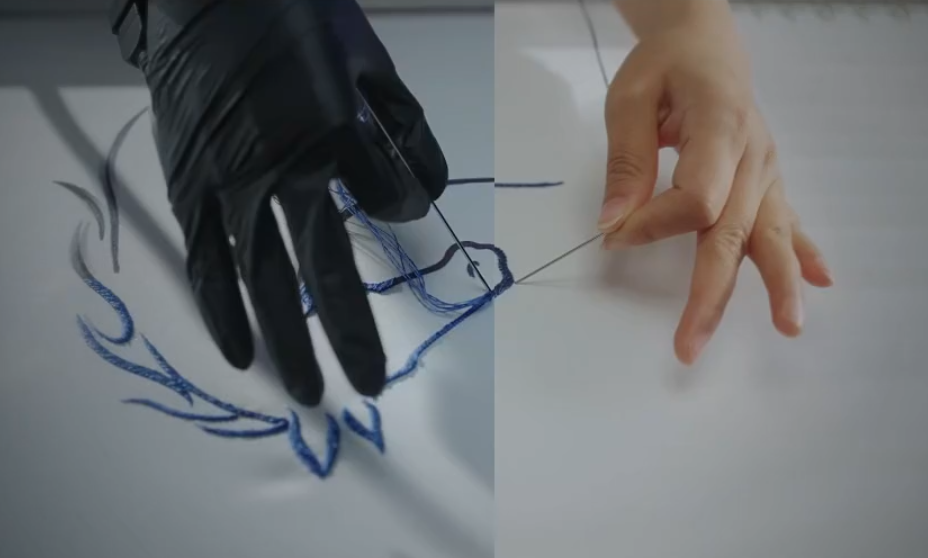
它石介紹稱,刺繡工作其實體現了機器人在復雜空間下的精細操作能力,相關能力有望遷移到線束裝配和精密制造等高精技術領域。
畢竟刺繡是一個比較極限的場景,對咱們人類來說,做針線活是靠感覺判斷,對機器人則需要靠量化判斷。
機器人需要實時感知針、線、布的變化。畢竟布料是一個輕薄的柔性物體,用力氣大了,布會起皺,小了也不行,所以很考驗對力覺的控制。同時針和線都是極其細小的物體,比較考驗機器人對精度的控制。
其次,是救傳統手藝。
據它石智航介紹,目前有部分針繡技法接近失傳,機器人學會刺繡技法,實際上也是讓非遺文化能夠以數字形態延續。
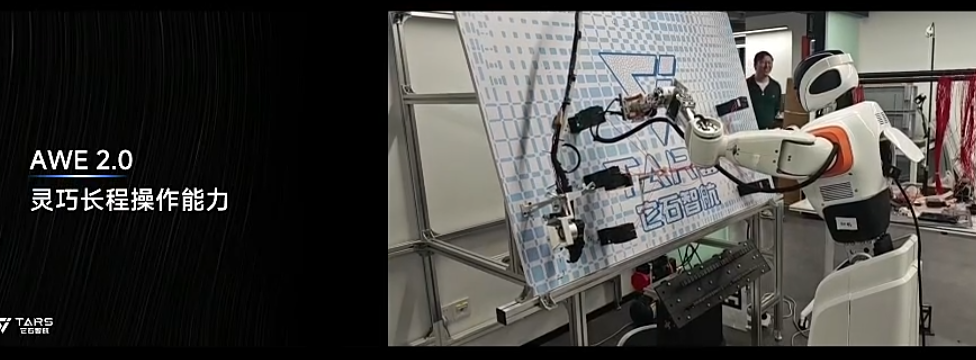
刺繡之外,它石還展示了復雜線束操作能力,在它石看來這是「機器人學的哥德巴赫猜想」。
因為機器人需要操作柔性物體,識別高密度線纜接口等,不能卡頓,順滑執行,同時考驗了效率、精度和成功率。

這是上一代機器人難以解決的痛點問題,也是這一代機器人技術的試金石。
它石給出了自己的解決方案,在真實世界中采集人類真實動作,反哺世界模型,軟硬一體探索下一代具身智能的Scaling Law。
探索下一代具身智能的Scaling Law
它石在技術發布會上,展示了軟硬全棧技術。
軟件方面,它石首先介紹了數據采集套件SenseHub,據它石智航首席科學家丁文超(下圖右二)介紹,?數據決定了具身智能的上限。
過去通過遙操,即人類佩戴設備,遠程遙控,讓機器人和自己同步做出動作,這種采集方式,采集到的不是人類的真實能力,而是為了機器人做出妥協。
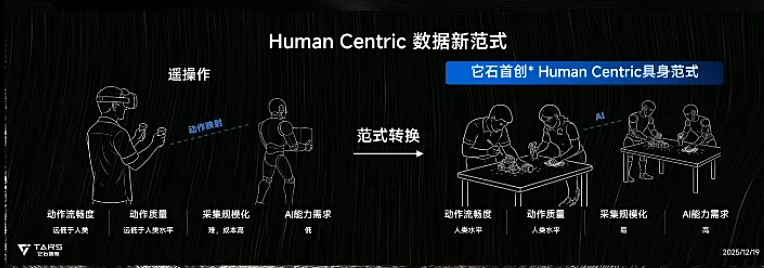
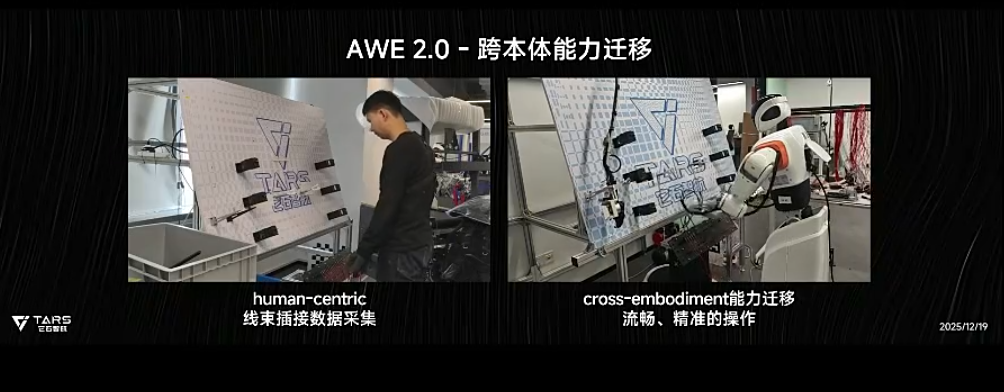
那么如何把人的動作,跨本體遷移到機器人?

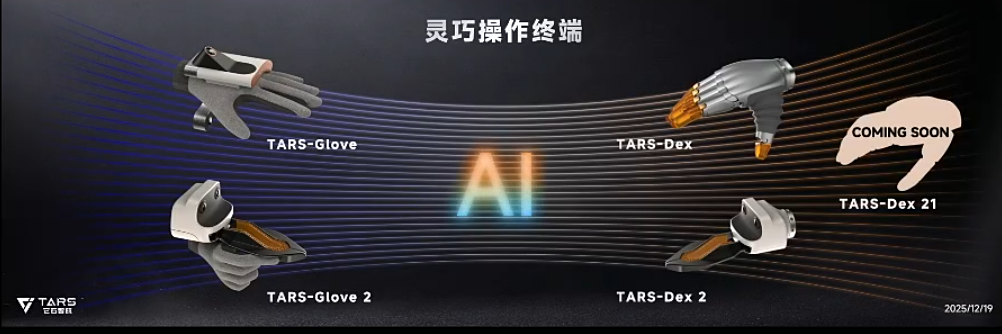
它石智航通過復現人類真實視角的TARS-Vision,以及靈巧手TARS Glove(通用五指)和Glove2(夾爪),“以人類為中心”采集數據,建立起環境和動作之間的因果關系,讓真實的物理世界就是數據來源,各行各業的從業者,穿上設備,就能自然采集數據。
據了解,基于SenseHub采集到的數據,目前已沉淀為具身智能真實世界多模態數據集WIYH,包含視覺、動作、語言和觸覺等類型。

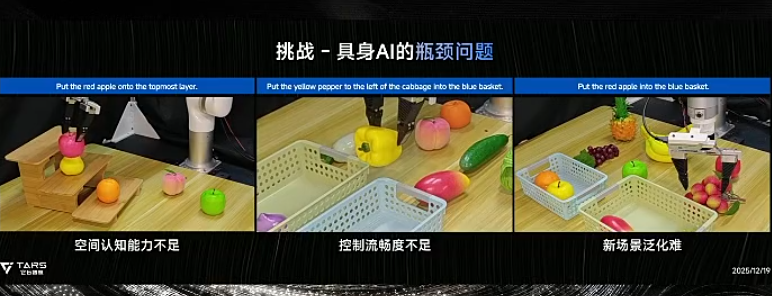
解決數據的問題后,具身智能還面臨著模型能力的挑戰。它石在實測目前SOTA(State Of The Art最先進的)開源成果后,發現具身智能模型面臨著三大瓶頸:
空間認知瓶頸,表現是經常認錯物體
流暢度不好,精準度也不夠
泛化瓶頸,一套系統難以適應不同環境、不同任務、不同動作。
解決這三個難題,就需要具身智能的下一代Scaling Law,它石打造了AWE2.0。
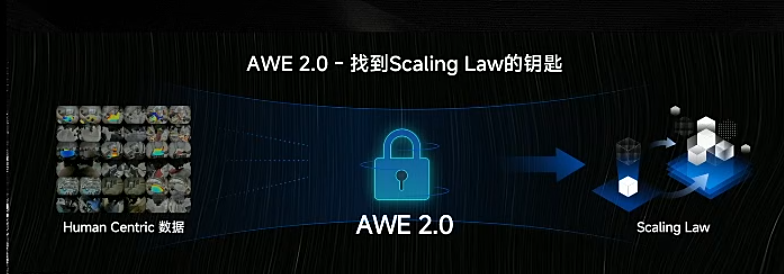
AWE 2.0把現實采集到的海量數據,用一段式全身端到端學習,遷移到機器人本體。
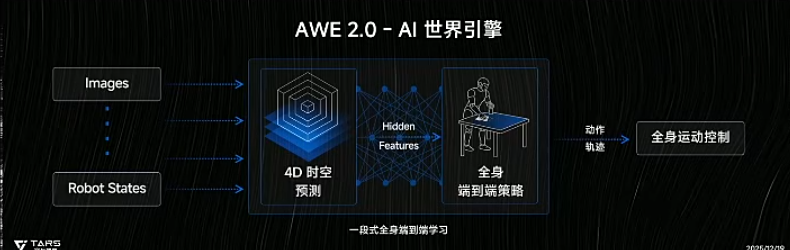
具體而言就是讓機器人學會動作和空間的關聯,用流式長期記憶關聯其中的特征,不是這個動作怎么做,而是為什么要這么做,理解背后的關系,
在探索Scaling Law的道路上,再聰明的大腦,也需要靈活的本體來支撐。
它石智航CEO陳亦倫認為,在AI時代,算法才是機器人系統能力的天花板,因此它石的硬件本體都是圍繞AI設計。這句話聽上去,很像今年行業經常說的「AI定義汽車」。

它石瞄向本體全身自由度盡可能逼近人類,這將從第一性原理上降低了跨本體遷移的難度。具體拆分為零部件來看,目前核心傳感器、計算單元、模型算法和整機系統,實現全棧自研。它石團隊過去十年在自動駕駛積累的車規級工程經驗,沉淀到具身智能領域。
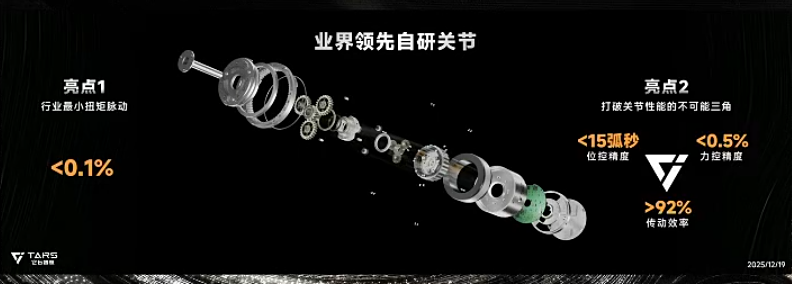
比如自研關節,實現行業最小扭矩脈動,平衡位控、力控和傳動的“不可能三角”。
傳感器組合方面,聚焦到眼睛和雙手這兩個核心部件,核心理念是人類和機器人共享同一套感知體系,讓機器人通過一套設備,看人所看,感人所感。

靈巧手終端,除了前面提到負責采集的Glove系列,還有干活的Dex系列,也是分為五指和夾爪,視需求選擇。
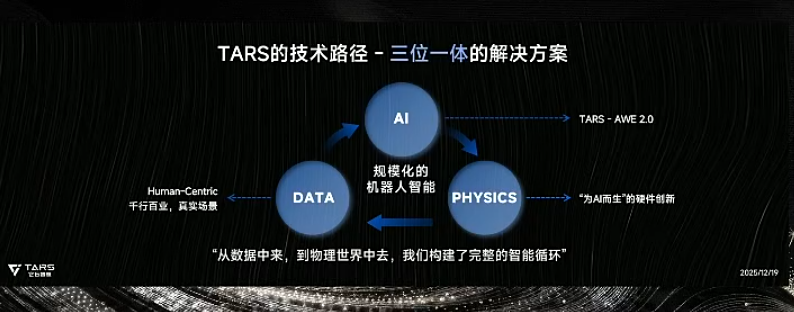
最后簡單總結一下,它石智航的技術路徑就是數據、模型和本體三位一體。數據采集是這一切的基礎,模型是具身智能實現Scaling Law的路徑,本體圍繞模型而設計。
它石智航表示,這次發布會不是為了展現某個點的突破,而是展示一種確定性。刺繡是一個起點,機器人將融入我們的生產與生活,它不是被控制的機器,而是能夠長期穩定工作的可靠智能體。
誰在背后推動著這種“確定性”?
它石智航是誰
它石智航,2025年2月正式成立,1個月后即官宣完成天使輪1.2億美元,刷新中國具身智能行業最大天使輪紀錄,這一輪由藍馳創投和啟明創投共同領投,線性資本、恒旭資本、洪泰基金、聯想創投、襄禾資本、高瓴創投跟投。
據說這還是VC搶著投的結果,動作不快的投資機構,排到了下一輪。7月初它石智航又對外官宣了天使+輪1.22億美元,領投方為美團,線性資本、襄禾資本,鈞山投資、碧鴻投資、國汽投資、臨港科創投、賽富投資基金、建發新興投資共同跟投。
兩輪融資額折合人民幣約為17億元,此后它石很少對外發聲,趕在歲末年終,首次發布技術,而發布會上走到臺前的有兩位核心人物。
首先是負責介紹總體情況和硬件本體的陳亦倫,他是它石智航的創始人兼CEO。
創業前歷任大疆機器視覺總工程師、華為自動駕駛系統CTO、清華大學AIR研究院智能機器人方向首席科學家。華為L2如今的“遙遙領先”,正是發端于他。

介紹模型算法的是它石智航的聯合創始人、首席科學家丁文超,是一位90后,生于1993年,是華為“天才少年”計劃的首批入選者,并且被派往了挑戰最大的自動駕駛軍團,從0到1主導了華為ADS智駕端到端決策網絡。
它石智航還有一位很少走到臺前的創始人:董事長李震宇。他早年在華為從事網絡技術研發,2007年加盟百度,一路升任百度集團資深副總裁,一手組建并長期領導自動駕駛事業部,為蘿卜快跑打下雄厚基礎。

它石的首次技術首秀,不僅展現了技術的全面,也初步透露了商業化構想:
不只ToB也不只ToC,依靠具身智能的Scaling Law,它石全都要。
一鍵三連「點贊」「轉發」「小心心」
歡迎在評論區留下你的想法!
—?完?—
專屬AI產品從業者的實名社群,只聊AI產品最落地的真問題
掃碼添加小助手,發送「姓名+公司+職位」申請入群~

進群后,你將直接獲得:
最新最專業的AI產品信息及分析
不定期發放的熱門產品內測碼
內部專屬內容與專業討論
點亮星標
科技前沿進展每日見



